Moottorin ja ilma-aluksen tyypistä riippumatta moottorin valvontaan käytettävät mittarit voidaan jakaa seuraavasti:
ensisijaiset (primääri-) moottorin valvontamittarit eli tehonvalvontamittarit
toissijaiset (sekundääri-) moottorin valvontamittarit eli moottorin järjestelmien valvontamittarit.
Tietynlainen arvolataus mittareiden nimityksissä johtuu siitä, että ennen automaattisäätimien tuloa moottorin tehoasetukset tehtiin primäärimittareiden lukemien perusteella. Sekundäärimittareiden lukemien perusteella seurattiin moottorin toimintaa.
Tehonvalvontamittareita ovat tavallisesti N1, EGT, N2, polttoaineen virtaus- ja jäljellä olevan polttoaineen määrämittari. Ennen elektronisten polttoaineen säätimien aikaa primäärimittaritaulussa oli myös EPR-mittari.
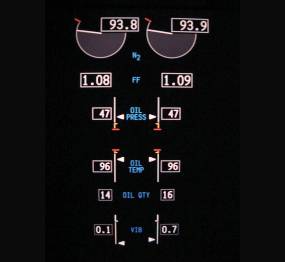
Sekundääripaneelissa on öljyn paine-, lämpötila- ja määrämittarit. Muita tyypillisiä mittareita tässä paneelissa ovat moottorin värinää ilmaiseva mittari ja hydraulipainemittari.
| Edellä esitettyä jakoa käytetään mittareiden ryhmittelyssä ohjaamon kojetauluun. Tehonvalvontamittarit pyritään sijoittamaan ohjaajan näkökenttään. Isojen, monimoottoristen koneiden ohjaamossa moottorijärjestelmien valvontamittarit ovat nykyään keskipaneelissa. Entisaikana, jolloin ohjaamomiehistöön kuului lentomekaanikko (flight engineer), moottorin järjestelmien valvontamittarit ja säätimet olivat hänen työpisteessään, joka sijaitsi taaempana ohjaamon sivulla. | |
| Uusien liikennekoneiden moottorin tehon ja järjestelmien valvontatiedot näytetään ohjaamon keskikonsolin näyttöruuduilla. Joidenkin tietojen näkyminen on käyttäjän valittavissa. Moottorin käynnistysvaiheen jälkeen kaikki epäoleellinen tieto voidaan poistaa näytöltä. Kun jotakin poikkeavaa ilmenee, järjestelmä tuo automaattisesti ruutuun varoituksen tapahtumasta, jolloin tapahtuneet muutokset on helpompi havaita. | |
Ilma-aluksen moottorin toiminnan ja suoritusarvojen valvomiseksi on tarpeen mitata
Perinteisesti ilmailussa painetta on mitattu johtamalla se kimmoisaan mittauselimeen, jossa paine-ero saa aikaan muodonmuutoksen. Muodonmuutos on verrannollinen paineen muutokseen. Muodonmuutos välittyy sopivalla välityskoneistolla osoittimelle, josta paineen suuruus on luettavissa.
Suihkumoottoreissa paineen mittaukseen ja
ilmaisuun ei kuitenkaan ole käytetty mekaanisia järjestelmiä, vaan sähköisiä.
Esimerkkejä sähköisistä paineen mittaustavoista ovat mm. kapasitiiviset,
resonanssivärähtelyyn, venymäliuskoihin tai pietsosähköisiin ilmaisimiin
perustuvat paineanturit. Sähköisten mittauselinten kehitys on edennyt nopeasti
digitaalisten moottorin säätöjärjestelmien mukana.
|
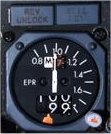
Aksiaaliturbiinimoottoreiden tehon ilmaisemiseen käytetään mm. moottorin painesuhdetta (EPR). Paineanturi mittaa kokonaispaineen ahtimen sisääntuloaukossa (pt2) ja toinen anturi matalapaineturbiinin jälkeen (pt7). EPR = pt7/pt2
|
 |
|
| Signaaleista laskettu painesuhde näytetään sähköisellä mittarilla tai uudemmissa koneissa digitaalisesti ohjatulla näyttöruudulla sekä numeerisena arvona että simuloituna mittarinäyttönä. | |
|
 |
|
Turbiinimoottorin tärkein lämpötilatieto on polttokammiosta turbiinille purkautuvan kaasun lämpötila (TIT, Turbine Inlet Temperature). Sen mittaaminen on kuitenkin erittäin vaikeaa kaasujen korkean lämpötilan ja suuren nopeuden takia. Tarpeeksi tukeva anturi turbiinin edessä häiritsisi pahoin kaasuvirtausta. Kaasujen lämpötiloilla on luonnollisesti keskinäinen riippuvuus turbiinin sisääntulon ja ulosmenon välillä. Ulosmenolämpötila (EGT) on helpompi mitata, ja siitä syystä sitä käytetään turbiinin kriittisen lämpötilan ilmaisemiseen. Moottorin testausvaiheessa on kokeellisesti etsitty EGT-arvo, jonka alapuolella toimittaessa voidaan olla varmoja, että kriittinen TIT ei ylity. Turbiinimoottorin EGT-lämpöparianturissa käytetään korkean lämpötilan takia
chromel-alumel -johdinparia. Normaalisti antureita on useita suihkuputken
kehällä heti takimmaisen turbiinivyöhykkeen takana. Anturit on kytkentärasioilla
ja liitosjohdoilla kytketty rinnan toisiinsa, joten mittarille tai
näyttölaitteelle tuleva signaali ilmaisee keskimääräisen EGT-arvon. |
|
Moottorin valvonnassa ja säädössä mekaanisen liikkeen mittauksella valvotaan moottorin kierroslukuja, polttoaineen virtausta, moottorin vääntövoimaa ja joitakin asentotietoja.
Mittareille tai laskimille välitettäviä asentotietoja ovat mm.
KierroslukumittariTurbiinimoottorin kierroslukumittari näyttää yleensä ahtimen kierrosluvun prosentteina kierroslukualueesta, jossa 100 % on suurin sallittu kierrosluku. Kaksiroottorisissa moottoreissa on molemmilla roottoreilla oma kierroslukunäyttönsä. Potkuriturbiinimoottorista mitataan myös potkurin kierrosluku, ja helikopterissa seurataan pääroottorin kierroslukua. Nämä mittarit kuuluvat ensisijaisiin moottorinvalvontamittareihin. |
 |
Kierroslukumittarien anturit ovat joko optisesti, magneettisesti tai laser-tekniikalla toteutettuja pulssilaskureita. Näyttölaite on perinteinen analoginen mittari tai tietokoneohjattu näyttöruutu.
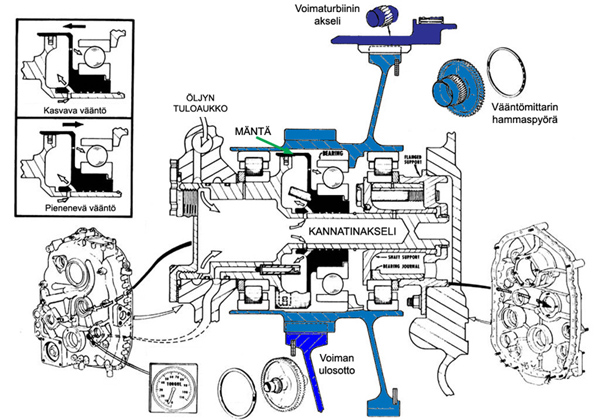
Potkuri- ja akseliturbiinimoottoreissa vääntömomentti mitataan usein voimaturbiinin akselin kiertymän suuruutena.
Kuvan moottorissa voimaturbiinin pääakselin kierrosluku lasketaan ulosottoakselille sopivaksi kaksivaiheisella hammaspyörästöllä, jonka akseleiden yhteenlaskettu kiertymä osoittaa moottorin kulloinkin tuottamaa vääntöä.
Voimaturbiinin akselilla ja voiman ulosottoakselilla on spiraalimaisesti rihlattu hammaskehä. Niiden välissä on vääntömomenttimittarin hammaspyörä, jossa on samoin spiraalimaisesti rihlattu hammastus. Rihlauksesta johtuen mittarin hammaspyörä liukuu kannatinakselinsa varassa eteenpäin (kuvassa vasemmalle) suhteessa alennusvaihteen akselien väliseen kiertymään. Liikkuessaan mittarin hammaspyörä siirtää mäntää, joka säätää vääntömomenttimittarin kammion öljynpainetta. Paineanturi lähettää tiedon edelleen ohjaamoon varsinaiselle mittarille tai näyttölaitteelle. Apulaitevaihteiston voiteluöljy toimii mittausjärjestelmän hydraulinesteenä.
Synkrojärjestelmä koostuu lähetin- ja vastaanotinsynkrosta ja niiden välisestä kytkennästä. Siinä vastaanotinsynkron neula liikkuu samaan tahtiin kuin lähetinsynkron anturi, joka on kytketty tarkkailtavaan laitteeseen. Sähkömekaanisesti synkro on muuntaja, jonka ensiö tai toisio on pyörivä. Pyörivää osaa nimitetään roottoriksi ja kiinteää osaa staattoriksi samoin kuin sähkö- tai suihkumoottoreissakin. Synkroille on ominaista, että sen ensiössä tai toisiossa on kolme käämiä tähtikytkennässä 120 asteen kulmassa toisiinsa nähden.
Järjestelmä koostuu lähetinsynkrosta (Transmitter, TX) ja vastaanotinsynkrosta (Receiver, TR). Kummankin synkron roottorille on kytketty herätejännite, joka ilma-aluksissa on yleisesti 26 VAC 400 Hz. Lähetinsynkro ja vastaanotinsynkro käsittävät kuulalaakerien varassa olevan roottorin, jota staattori ympäröi. Kotelon toisessa päässä on kaksi harjaa, jotka yhdistävät ulkoisen tehonlähteen roottoriin sen akselilla olevien liukurenkaiden välityksellä. Akselin toinen pää tulee esille kotelosta, jotta siihen voi kiinnittää osoittimen, kun on kysymyksessä vastaanotinsynkro.
Lähetinsynkron akseli on kytketty mittauselimeen, paineenmittauksessa esimerkiksi hammasrattaiden avulla bourdon-kaareen tai asennon osoituksessa esimerkiksi laskusiivekkeisiin vivuston välityksellä.
Nämä synkrot muodostavat yksinkertaisimman järjestelmän osoittimien poikkeuttamiseksi suoraan käyttämättä lisävahvistusta. Tällaisen järjestelmän tarkkuutta rajoittavat vastaanotinsynkron laakerien ja osoitinmekanismin kitka. Periaatteessa nämä synkrot ovat muodoltaan ja rakenteeltaan samanlaisia ja ne eroavat toisistaan vain siinä, että lähetinsynkron roottorin ja staattorin käämitykset ovat paksumpaa lankaa.
Valvontasynkrojärjestelmässä korvataan vastaanotinsynkro (TR) valvontasynkrolla CT (Control Transformer). Olennainen ero momenttisynkrojärjestelmään on se, että valvontasynkro ei pysty tekemään "työtä", vaan se ilmoittaa järjestelmän poikkeaman tasapainotilastaan roottorin ulostulojännitteen muutoksena ja poikkeaman suunta määritellään ulostulojännitteen vaiheisuuden avulla. Valvontasynkrojärjestelmän hyödyntäminen edellyttää servojärjestelmän käyttöä toimintojen suorituksissa (vahvistin tai vääntömoottori).
Erosynkrojärjestelmällä voidaan laskea synkrojen kulma-arvoja yhteen tai vähentää niitä toisistaan kytkennästä riippuen. Erosynkrossa (Differential transmitter, CDX tai TDX) on myös roottorin käämitys kolmivaiheinen.
|
Synkrojen kuvauksen alussa mainittiin, että sähkömekaanisesti synkro on muuntaja, jonka ensiö tai toisio on pyörivä. Lineaariasentoanturi on myös rakenteeltaan säätömuuntaja. Tämän päivän terminologiassa puhutaan synkroista myös nimellä RVDT (Rotary Variable Differential Transmitter). |
Lineaariasentoanturia käytetään kun on tarvetta välittää suoria liikkeitä. Sillä välitetään esimerkiksi siivekkeiden ja korkeusvakaimen asentotieto mittarille ja servojen / siivekkeiden asentotieto autopilotille. Moottoreiden säätöjärjestelmissä käytetään myös lineaariasentoantureita, esimerkiksi säädettävien ohjaussiipien tai vuodatusventtiilien asennon ilmaisemiseen.
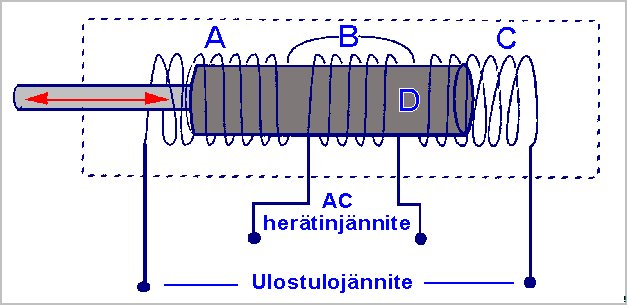
Lineaariasentoanturiin kuuluu putki, jonka ympärille on käämitty ensiökäämi B ja kaksi toisiokäämiä. Toisiokäämi C on käämitty samansuuntaisesti ensiökäämi B:n kanssa ja toisiokäämi A vastakkaissuuntaisesti. Putken sisällä liikkuu meltorauta-ankkuri esimerkiksi ohjainpinnan kulloisenkin asennon mukaan.
Toimintaperiaate:
Ensiökäämiin tuodaan herätinjännite, jolloin toisiokäämeihin indusoituvat
jännitteet, joiden suuruus riippuu ankkurin asennosta. Toisiokäämiin C
indusoituva jännite on samanvaiheinen ensiökäämin jännitteen kanssa ja
toisiokäämin A jännite on 180° vaihesiirrossa.
Ankkurin ollessa keskiasennossa ulostulojännite on nolla, koska toisiojännitteet
A ja C ovat samansuuruisia mutta jännitteiden vaiheistus on vastakkainen (180°).
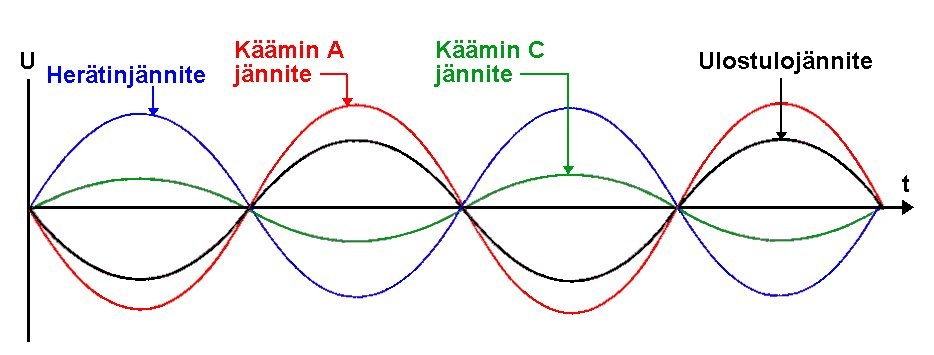
Tilanne, jossa ankkuri aiheuttaa suuremman jännitteen käämiin A, on esitetty oheisessa käyrästössä. Ulostulojännite viedään mittarille tai laskimelle, jossa mitataan jännite ja vaiheistus ensiöjännitteeseen nähden ja saadaan selville ankkurin asento.
Turbiinimoottorin polttoainevirtauksen mittaus perustuu massavirran eikä tilavuusvirran mittaukseen.
Virtausmittarin anturi on sijoitettu polttoaineputkeen polttoainesäätimen hydromekaanisessa osassa (HMU). Siinä on kolmivaihemoottorin vakionopeudella pyörittämä siipipyörä ja sen jälkeen turbiini, jonka liike on rajoitettu kalibroitujen jousien avulla. Siipipyörä muuttaa virtauksen putkessa spiraalimaiseksi. Osuessaan turbiinin siipiin virtaus pyrkii kääntämään turbiinia. Momenttisynkro välittää turbiinin kääntymiskulman mittarin näyttöön.
Luonnollisesti kääntymiskulman suuruuteen vaikuttaa se, kuinka "paksu" neste putkessa virtaa. Näin sekä polttoaineen ominaispaino että määrä saadaan vaikuttamaan turbiinin kääntymisen suuruuteen.
EFIS (Electronic Flight Instrument System) tarkoittaa järjestelmää, jossa perinteiset sähkömekaaniset mittarit on korvattu näyttöruuduilla (katodisädeputkilla, nestekidenäytöillä tai yleensä uusinta teknologiaa edustavilla menetelmillä). Näytöillä olevat kuvat muistuttavat paljon vanhojen mittareiden näyttöjä, mutta näyttöruudulle voidaan helposti lisätä muita tietoja, jotka kulloinkin ovat moottorin tilan seurannan tai lentoturvallisuuden kannalta tärkeitä.
EFIS toimii useiden järjestelmien tietojen näyttöruutuna :
A) Ohjaus- ja suunnistusjärjestelmät
B) Koneen toimintoihin liittyvät järjestelmät:
1. moottori (kierrosluvut, lämpötilat, paineet)
2. polttoainejärjestelmä.
Muita järjestelmiä ovat hydraulijärjestelmä, sähköjärjestelmä, ilmastointi, kaikki hälytykset ja huoltotietojärjestelmä.
Tyypillisesti EFIS koostuu isoissa ilma-aluksissa useista näyttöruuduista, kuten ohjausnäyttö, navigointinäyttö ja monitoiminäyttö. Lisäksi järjestelmään kuuluu näyttöjen valintapaneli, näyttöprosessori ja toimintoprosessori. EFIS-näyttöjärjestelmien ominaisuudet poikkeavat toisistaan valmistajakohtaisesti ja samalla valmistajalla jopa tietyssä mallissa varustelutasosta riippuen.